Pioneering 5D AI Robotics for Real-World Autonomy
We are developing next-generation autonomous robots that understand and interact with the physical world through 5D world models—combining 3D geometry, temporal dynamics, and physical properties.
Research Divisions
Our initiative focuses on two complementary research areas to achieve autonomous robots capable of self-recognition, manipulation, and collaboration in unstructured environments.
Adaptive Robot Platform
Developing physical platforms that understand and adapt to real-world interactions through advanced sensing and actuation systems.
- Adaptive actuators and tactile sensors for unstructured environments
- Human-level precision interaction interfaces
- Real-time reflex control systems
- Multi-modal sensor integration
5D Robot AI
Creating AI foundation models that enable robots to understand and predict physical interactions in complex real-world scenarios.
- 5D World Foundation Model with scene graphs
- Whole-body locomotion and manipulation foundation models
- Real-time robot response prediction
- Physics-Informed Neural Networks (PINN)
What is 5D AI?
Beyond traditional 3D perception, our 5D approach integrates spatial, temporal, and physical understanding for true real-world autonomy.
5D World Model
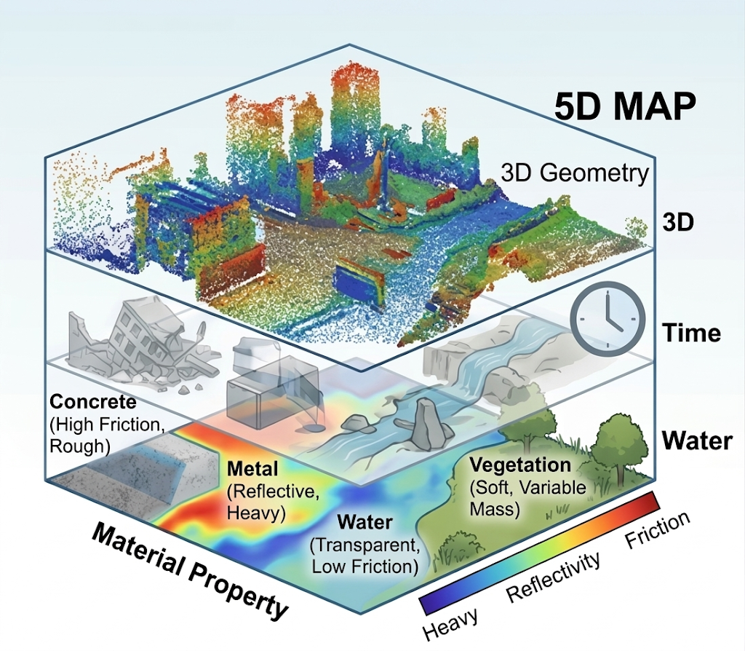
3D Geometry + Time + Physical Properties (material, mass, friction, tactile response)
5D Intelligence System
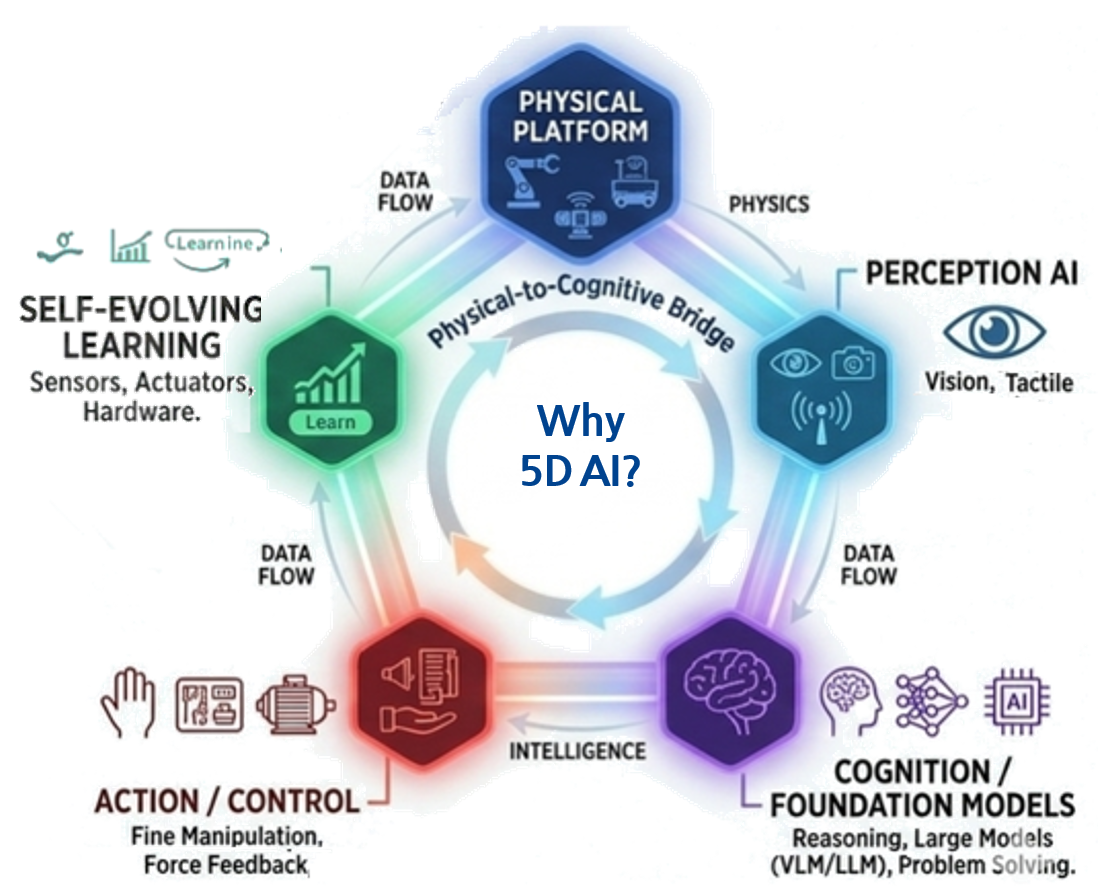
Physical Platform + Perception AI + Situational Foundation Model + Precision Control + Self-Evolving Learning
Join the Future of Robotics
We are actively recruiting talented postdoctoral researchers to join our world-class team. Work with leading experts from KAIST and top universities across Republic of Korea.
View RecruitingPartner Institutions
Universities

KAIST

GIST

DGIST

Yonsei University
Korea University

Hanyang University

Kookmin University

Jeonbuk National University

Korea University of Technology

CMU

TU Wien

Stanford
Research Institutes & Partners

ETRI

KETI

KIMM

KITECH

URobotics

WIRobotics

UON Robotics

UJIN Technology

SWAN Robotics

PRISM-AI

AITA

KI-DR

KAIST Robotics Program